Investigación básica. Péndulo inverso Resumen de métodos de control objetos de tipo péndulo inverso
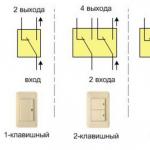
Representación esquemática de un péndulo invertido sobre un carro. La varilla no tiene masa. Denotamos la masa del carro y la masa de la bola en el extremo de la barra por METRO Y metro. La varilla tiene una longitud yo.
Un péndulo invertido es un péndulo que tiene un centro de masa por encima de su fulcro, fijado en el extremo de una barra rígida. A menudo, el fulcro se fija en un carro que se puede mover horizontalmente. Mientras que un péndulo normal cuelga constantemente hacia abajo, un péndulo inverso es inherentemente inestable y debe equilibrarse constantemente para mantenerse erguido, ya sea aplicando torsión al punto de pivote o moviendo el punto de pivote horizontalmente, como parte del sistema de retroalimentación. lo más simple manifestación puede ser el equilibrio del lápiz al final del dedo.
Revisar
El péndulo invertido es un problema clásico en dinámica y teoría de control y es ampliamente utilizado como punto de referencia para probar algoritmos de control (controladores PID, redes neuronales, control difuso, etc.).
El problema del péndulo inverso está relacionado con la guía del misil, ya que el motor del misil está ubicado debajo del centro de gravedad, lo que provoca inestabilidad. El mismo problema se resuelve, por ejemplo, en el segway, un dispositivo de transporte autoequilibrado.
Otra forma de estabilizar un péndulo inverso es balancear rápidamente la base en un plano vertical. En este caso, puede prescindir de comentarios. Si las oscilaciones son lo suficientemente fuertes (en términos de aceleración y amplitud), entonces el péndulo inverso puede estabilizarse. Si el punto en movimiento oscila de acuerdo con oscilaciones armónicas simples, entonces el movimiento del péndulo se describe mediante la función de Mathieu.
Ecuaciones de movimiento
Con un punto fijo de apoyo
La ecuación de movimiento es similar a la de un péndulo recto excepto que el signo de la posición angular se mide desde la posición vertical del equilibrio inestable:
θ ¨ − gramo ℓ pecado θ = 0 (\displaystyle (\ddot (\theta))-(g \over \ell )\sin \theta =0)Cuando se traduce, tendrá el mismo signo de aceleración angular:
θ ¨ = gramo ℓ pecado θ (\displaystyle (\ddot (\theta))=(g \over \ell )\sin \theta )Así, el péndulo inverso acelerará desde el equilibrio inestable vertical en la dirección opuesta, y la aceleración será inversamente proporcional a la longitud. Un péndulo alto cae más lentamente que uno corto.
Péndulo en carro
Las ecuaciones de movimiento se pueden derivar usando las ecuaciones de Lagrange. Esta es la figura de arriba, donde θ (t) (\displaystyle \theta (t)) longitud del ángulo del péndulo l (\ estilo de visualización l) en relación con la vertical y la fuerza de acción de la gravedad y las fuerzas externas F (\ estilo de visualización F) en la dirección x (\ estilo de visualización x). definamos x (t) (\displaystyle x(t)) posición del carro. Lagrangiano L = T − V (\displaystyle L=T-V) sistemas:
L = 1 2 METRO v 1 2 + 1 2 metro v 2 2 - metro gramo ℓ porque θ (\displaystyle L=(\frac (1)(2))Mv_(1)^(2)+(\frac (1) (2))mv_(2)^(2)-mg\ell\cos\theta)donde es la velocidad del carro, y es la velocidad del punto material m (\ estilo de visualización m). v 1 (\ estilo de visualización v_ (1)) Y v 2 (\ estilo de visualización v_ (2)) se puede expresar a través de x (\ estilo de visualización x) Y θ (\ estilo de visualización \ theta) escribiendo la velocidad como la primera derivada de la posición.
v 1 2 = x ˙ 2 (\displaystyle v_(1)^(2)=(\dot (x))^(2)) v 2 2 = (re re t (x - ℓ pecado θ)) 2 + (re re t (ℓ porque θ)) 2 (\displaystyle v_(2)^(2)=\left((\frac (d)(dt) ))(\left(x-\ell \sin \theta \right))\right)^(2)+\left((\frac (d)(dt))(\left(\ell \cos \theta \ derecha))\derecha)^(2))Simplificación de expresiones v 2 (\ estilo de visualización v_ (2)) lleva a:
v 2 2 = x ˙ 2 − 2 ℓ x ˙ θ ˙ porque θ + ℓ 2 θ ˙ 2 (\displaystyle v_(2)^(2)=(\dot (x))^(2)-2\ell (\dot (x))(\dot (\theta))\cos \theta +\ell ^(2)(\dot (\theta))^(2))El lagrangiano ahora se define mediante la fórmula:
L = 1 2 (METRO + metro) X ˙ 2 - metro ℓ X ˙ θ ˙ porque θ + 1 2 metro ℓ 2 θ ˙ 2 - metro gramo ℓ porque θ (\displaystyle L=(\frac (1)(2) ))\left(M+m\right)(\dot (x))^(2)-m\ell (\dot (x))(\dot (\theta))\cos \theta +(\frac ( 1)(2))m\ell ^(2)(\dot (\theta))^(2)-mg\ell \cos \theta )y las ecuaciones de movimiento:
re re t ∂ L ∂ X ˙ − ∂ L ∂ X = F (\displaystyle (\frac (\mathrm (d) )(\mathrm (d) t))(\parcial (L) \over \parcial (\dot (x) )))-(\parcial (L) \sobre \parcial x)=F) re re t ∂ L ∂ θ ˙ - ∂ L ∂ θ = 0 (\displaystyle (\frac (\mathrm (d) )(\mathrm (d) t))(\parcial (L) \over \parcial (\dot (\ theta)))-(\parcial (L) \over \parcial \theta )=0)Sustitución L (\ estilo de visualización L) en estas expresiones con la subsiguiente simplificación conduce a ecuaciones que describen el movimiento del péndulo inverso:
(METRO + metro) X ¨ - metro ℓ θ ¨ porque θ + metro ℓ θ ˙ 2 pecado θ = F (\displaystyle \left(M+m\right)(\ddot (x))-m\ell ( \ddot (\theta))\cos \theta +m\ell (\dot (\theta))^(2)\sin \theta =F) ℓ θ ¨ − gramo pecado θ = X ¨ porque θ (\displaystyle \ell (\ddot (\theta))-g\sin \theta =(\ddot (x))\cos \theta )Estas ecuaciones no son lineales, pero dado que el objetivo del sistema de control es mantener el péndulo vertical, las ecuaciones se pueden linealizar tomando θ ≈ 0 (\displaystyle \theta \approx 0).
Péndulo con base oscilante
La ecuación de movimiento de tal péndulo está relacionada con una base oscilante sin masa y se obtiene de la misma manera que para un péndulo sobre un carro. La posición del punto material está determinada por la fórmula:
(− ℓ sin θ , y + ℓ porque θ) (\displaystyle \left(-\ell \sin \theta ,y+\ell \cos \theta \right))y la velocidad se encuentra a través de la primera derivada de la posición:
v 2 = y ˙ 2 - 2 ℓ y ˙ θ ˙ pecado θ + ℓ 2 θ ˙ 2 . (\displaystyle v^(2)=(\dot (y))^(2)-2\ell (\dot (y))(\dot (\theta))\sin \theta +\ell ^(2) (\punto (\theta))^(2).)El lagrangiano para este sistema se puede escribir como:
L = 1 2 metro (y ˙ 2 − 2 ℓ y ˙ θ ˙ pecado θ + ℓ 2 θ ˙ 2) − metro gramo (y + ℓ porque θ) (\displaystyle L=(\frac (1)(2) )m\left((\dot (y))^(2)-2\ell (\dot (y))(\dot (\theta))\sin \theta +\ell ^(2)(\dot ( \theta))^(2)\right)-mg\left(y+\ell \cos \theta \right))las ecuaciones de movimiento se siguen de:
re re t ∂ L ∂ θ ˙ - ∂ L ∂ θ = 0 (\displaystyle (\mathrm (d) \over \mathrm (d) t)(\parcial (L) \over \parcial (\dot (\theta))) -(\parcial (L) \sobre \parcial \theta )=0)Un péndulo invertido es un péndulo que tiene un centro de masa por encima de su fulcro, fijado en el extremo de una barra rígida. A menudo, el fulcro se fija en un carro que se puede mover horizontalmente. Mientras que un péndulo normal cuelga constantemente hacia abajo, un péndulo inverso es inherentemente inestable y debe equilibrarse constantemente para mantenerse erguido, ya sea aplicando torsión al punto de pivote o moviendo el punto de pivote horizontalmente, como parte del sistema de retroalimentación. La demostración más sencilla sería equilibrar un lápiz en la punta del dedo.
Revisar
El péndulo invertido es un problema clásico en dinámica y teoría de control y es ampliamente utilizado como punto de referencia para probar algoritmos de control (controladores PID, redes neuronales, control difuso, etc.).
El problema del péndulo inverso está relacionado con la guía del misil, ya que el motor del misil está ubicado debajo del centro de gravedad, lo que provoca inestabilidad. El mismo problema se resuelve, por ejemplo, en el segway, un dispositivo de transporte autoequilibrado.
Otra forma de estabilizar un péndulo inverso es balancear rápidamente la base en un plano vertical. En este caso, puede prescindir de comentarios. Si las oscilaciones son lo suficientemente fuertes (en términos de aceleración y amplitud), entonces el péndulo inverso puede estabilizarse. Si el punto en movimiento oscila de acuerdo con oscilaciones armónicas simples, entonces el movimiento del péndulo se describe mediante la función de Mathieu.
Ecuaciones de movimiento
Con un punto fijo de apoyo
La ecuación de movimiento es similar a la de un péndulo recto excepto que el signo de la posición angular se mide desde la posición vertical del equilibrio inestable:
texvc extraviado; Consulte math/README para obtener ayuda con la configuración): \ddot \theta - (g \over \ell) \sin \theta = 0
Cuando se traduce, tendrá el mismo signo de aceleración angular:
No se puede analizar la expresión (archivo ejecutabletexvc extraviado; Consulte math/README para obtener ayuda con la configuración): \ddot \theta = (g \over \ell) \sin \theta
Así, el péndulo inverso acelerará desde el equilibrio inestable vertical en la dirección opuesta, y la aceleración será inversamente proporcional a la longitud. Un péndulo alto cae más lentamente que uno corto.
Péndulo en carro
Las ecuaciones de movimiento se pueden derivar usando las ecuaciones de Lagrange. Esta es la figura de arriba, donde No se puede analizar la expresión (archivo ejecutable texvc extraviado; Consulte math/README para obtener ayuda con la configuración): \theta(t) longitud del ángulo del péndulo No se puede analizar la expresión (archivo ejecutable texvc extraviado; Consulte math/README para obtener ayuda con la configuración): l en relación con la vertical y la fuerza de acción de la gravedad y las fuerzas externas No se puede analizar la expresión (archivo ejecutable texvc extraviado; Consulte matemáticas/LÉAME para obtener ayuda con la configuración.): F en la dirección No se puede analizar la expresión (archivo ejecutable texvc . definamos No se puede analizar la expresión (archivo ejecutable texvc extraviado; Consulte matemáticas/LÉAME para obtener ayuda con la configuración): x(t) posición del carro. Lagrangiano No se puede analizar la expresión (archivo ejecutable texvc extraviado; Consulte matemáticas/LÉAME para obtener ayuda con la configuración): L = T - V sistemas:
texvc extraviado; Consulte matemáticas/LÉAME para obtener ayuda con el ajuste): L = \frac(1)(2) M v_1^2 + \frac(1)(2) m v_2^2 - m g \ell\cos\theta
Dónde No se puede analizar la expresión (archivo ejecutable texvc es la velocidad del carro, y No se puede analizar la expresión (archivo ejecutable texvc - velocidad del punto de material No se puede analizar la expresión (archivo ejecutable texvc extraviado; Consulte math/README para obtener ayuda con la configuración.): m
.
No se puede analizar la expresión (archivo ejecutable texvc extraviado; Consulte matemáticas/LÉAME para obtener ayuda con la configuración): v_1 Y No se puede analizar la expresión (archivo ejecutable texvc extraviado; Consulte matemáticas/LÉAME para obtener ayuda con la configuración): v_2 se puede expresar a través de No se puede analizar la expresión (archivo ejecutable texvc extraviado; Consulte matemáticas/LÉAME para obtener ayuda con la configuración.): x Y No se puede analizar la expresión (archivo ejecutable texvc extraviado; Consulte math/README para obtener ayuda con la configuración): \theta escribiendo la velocidad como la primera derivada de la posición.
texvc extraviado; Consulte matemáticas/LÉAME para obtener ayuda con la configuración): v_1^2=\dot x^2
No se puede analizar la expresión (archivo ejecutable texvc extraviado; Consulte math/README para obtener ayuda con la configuración): v_2^2=\left((\frac(d)(dt))(\left(x- \ell\sin\theta\right))\right)^2 + \ izquierda((\frac(d)(dt))(\left(\ell\cos\theta \right))\right)^2
Simplificación de expresiones No se puede analizar la expresión (archivo ejecutable texvc extraviado; Consulte matemáticas/LÉAME para obtener ayuda con la configuración): v_2 lleva a:
texvc extraviado; Consulte math/README para obtener ayuda con la configuración): v_2^2= \dot x^2 -2 \ell \dot x \dot \theta\cos \theta + \ell^2\dot \theta^2
El lagrangiano ahora se define mediante la fórmula:
No se puede analizar la expresión (archivo ejecutabletexvc extraviado; Consulte matemáticas/LÉAME para obtener ayuda con la configuración): L = \frac(1)(2) \left(M+m \right) \dot x^2 -m \ell \dot x \dot\theta\cos\ theta + \frac(1)(2) m \ell^2 \dot \theta^2-m g \ell\cos \theta
y las ecuaciones de movimiento:
No se puede analizar la expresión (archivo ejecutabletexvc extraviado; Consulte math/README para obtener ayuda con la configuración): \frac(\mathrm(d))(\mathrm(d)t)(\partial(L)\over \partial(\dot x)) - (\partial( L) \sobre \parcial x) = F
No se puede analizar la expresión (archivo ejecutable texvc extraviado; Consulte math/README para obtener ayuda con la configuración): \frac(\mathrm(d))(\mathrm(d)t)(\partial(L)\over \partial(\dot \theta)) - (\partial (L )\sobre\parcial\theta) = 0
Sustitución No se puede analizar la expresión (archivo ejecutable texvc extraviado; Consulte matemáticas/LÉAME para obtener ayuda con la configuración.): L en estas expresiones con la subsiguiente simplificación conduce a ecuaciones que describen el movimiento del péndulo inverso:
texvc extraviado; Consulte matemáticas/LÉAME para obtener ayuda con la configuración): \left (M + m \right) \ddot x - m \ell \ddot \theta \cos \theta + m \ell \dot \theta^2 \sin \theta = F
No se puede analizar la expresión (archivo ejecutable texvc extraviado; Consulte math/README para obtener ayuda con la configuración): \ell \ddot \theta - g \sin \theta = \ddot x \cos \theta
Estas ecuaciones no son lineales, pero dado que el objetivo del sistema de control es mantener el péndulo vertical, las ecuaciones se pueden linealizar tomando No se puede analizar la expresión (archivo ejecutable texvc extraviado; Consulte math/README para obtener ayuda con la configuración): \theta \approx 0
.
Péndulo con base oscilante
La ecuación de movimiento de tal péndulo está relacionada con una base oscilante sin masa y se obtiene de la misma manera que para un péndulo sobre un carro. La posición del punto material está determinada por la fórmula:
No se puede analizar la expresión (archivo ejecutabletexvc extraviado; Consulte math/README para obtener ayuda con la configuración): \left(-\ell \sin \theta , y + \ell \cos \theta \right)
y la velocidad se encuentra a través de la primera derivada de la posición:
No se puede analizar la expresión (archivo ejecutabletexvc extraviado; Consulte math/README para obtener ayuda con la configuración): v^2=\dot y^2-2 \ell \dot y \dot \theta \sin \theta + \ell^2\dot \theta ^2.
No se puede analizar la expresión (archivo ejecutable texvc extraviado; Consulte math/README para obtener ayuda con la configuración): \ddot \theta - (g \over \ell) \sin \theta = -(A \over \ell) \omega^2 \sin \omega t \sin \theta .
Esta ecuación no tiene una solución elemental en forma cerrada, pero se puede estudiar en muchas direcciones. Está cerca de la ecuación de Mathieu, por ejemplo, cuando la amplitud de oscilación es pequeña. El análisis muestra que el péndulo permanece en posición vertical cuando se balancea rápidamente. El primer gráfico muestra que con oscilaciones lentas No se puede analizar la expresión (archivo ejecutable texvc , el péndulo cae rápidamente después de dejar una posición vertical estable.
Si No se puede analizar la expresión (archivo ejecutable texvc extraviado; Consulte math/README para obtener ayuda con la configuración.): y oscila rápidamente, el péndulo puede ser estable en la posición vertical. El segundo gráfico muestra que, después de dejar la posición vertical estable, el péndulo ahora comienza a oscilar alrededor de la posición vertical ( No se puede analizar la expresión (archivo ejecutable texvc extraviado; Consulte math/README para obtener ayuda con la configuración): \theta = 0) La desviación de la posición vertical sigue siendo pequeña y el péndulo no cae.
Solicitud
Un ejemplo es el equilibrio de personas y objetos, como en acrobacias o andar en monociclo. Y también un segway, un scooter eléctrico de dos ruedas con autoequilibrio.
El péndulo invertido fue un componente central en el desarrollo de varios de los primeros sismógrafos.
ver también
Enlaces
- D. Liberzón Conmutación en Sistemas y Control(2003 Springer) págs. 89ff
Otras lecturas
- Franklin; et al. (2005). Control de realimentación de sistemas dinámicos, 5, Prentice Hall. ISBN 0-13-149930-0
Escriba una reseña sobre el artículo "Péndulo inverso"
Enlaces
Un extracto que describe el péndulo inverso
La hermana de su abuelo, Alexandra Obolenskaya (más tarde, Alexis Obolensky), también se exilió con ellos, y Vasily y Anna Seregins, que se fueron voluntariamente, siguieron a su abuelo por su propia elección, ya que Vasily Nikandrovich fue durante muchos años el abogado del abuelo en todos sus asuntos y uno de los más cercanos a sus amigos.Alexandra (Alexis) Obolenskaya Vasily y Anna Seryogin
Probablemente, uno tenía que ser un verdadero AMIGO para encontrar la fuerza en uno mismo para hacer tal elección e ir por propia voluntad a donde iba, como se va sólo a la propia muerte. Y esta "muerte", por desgracia, se llamaba entonces Siberia...
Siempre estuve muy triste y dolido por nuestra, tan orgullosa, pero tan despiadadamente pisoteada por las botas bolcheviques, ¡hermosa Siberia!... Y no hay palabras para expresar cuánto sufrimiento, dolor, vidas y lágrimas esta orgullosa, pero agotada hasta el límite, tierra absorbida... ¿Será porque alguna vez fue el corazón de nuestra patria ancestral, "revolucionarios con visión de futuro" decidieron denigrar y destruir esta tierra, eligiéndola para sus propósitos diabólicos?... Después de todo, para muchas personas, incluso después de muchos años, Siberia seguía siendo una tierra "maldita", donde murió el padre de alguien, el hermano de alguien, luego el hijo de alguien... o tal vez incluso toda la familia de alguien.
Mi abuela, a quien yo, para mi gran disgusto, nunca conocí, en ese momento estaba embarazada de mi padre y soportó muy duro el camino. Pero, por supuesto, no había necesidad de esperar ayuda de ningún lado... Así que la joven princesa Elena, en lugar del silencioso susurro de los libros en la biblioteca familiar o los habituales sonidos del piano cuando tocaba sus obras favoritas, este el tiempo solo escuchaba el ominoso sonido de las ruedas, que como amenazadoras contaban las horas que le quedaban de vida, tan frágil y convertida en una verdadera pesadilla... Estaba sentada sobre unos sacos frente a la sucia ventanilla del auto y miraba fijamente. ante los últimos vestigios lastimosos de la "civilización" tan familiar y familiar para ella yendo cada vez más lejos...
La hermana del abuelo, Alexandra, con la ayuda de amigos, logró escapar en una de las paradas. De común acuerdo, se suponía que debía llegar (si tenía suerte) a Francia, donde este momento vivía toda su familia. Es cierto que ninguno de los presentes podía imaginar cómo podría hacer esto, pero dado que esta era su única, aunque pequeña, pero ciertamente la última esperanza, era demasiado lujo rechazarlo para su situación completamente desesperada. En ese momento también se encontraba en Francia el marido de Alexandra, Dmitry, con cuya ayuda esperaban, ya desde allí, intentar ayudar a la familia del abuelo a salir de aquella pesadilla en la que tan despiadadamente les había arrojado la vida, con la vil manos de gente brutalizada...
Al llegar a Kurgan, los instalaron en un sótano frío, sin explicarles nada y sin responder a ninguna pregunta. Dos días después, unas personas vinieron por el abuelo, y afirmaron que supuestamente venían a “escoltarlo” a otro “destino”… Se lo llevaron como a un delincuente, no permitiéndole llevar nada consigo, y sin dignarse. para explicar dónde y por cuánto tiempo lo están tomando. Nadie volvió a ver al abuelo. Después de un tiempo, un militar desconocido le llevó las pertenencias personales del abuelo a la abuela en un saco de carbón sucio... sin explicar nada y sin dejar esperanzas de verlo con vida. En esto, cesó cualquier información sobre el destino del abuelo, como si hubiera desaparecido de la faz de la tierra sin ningún rastro ni evidencia ...
El corazón atormentado y atormentado de la pobre princesa Elena no quería aceptar una pérdida tan terrible, y literalmente bombardeó al oficial de personal local con solicitudes para aclarar las circunstancias de la muerte de su amado Nikolai. Pero los oficiales "rojos" estaban ciegos y sordos a las solicitudes de una mujer solitaria, como la llamaban, "de la noble", que para ellos era solo una de las miles y miles de unidades "numeradas" sin nombre que no significaban nada en su mundo frío y cruel... Era un auténtico infierno, del que no había vuelta atrás a aquel familiar y buen mundo, en la que su casa, sus amigos, y todo aquello a lo que estaba acostumbrada desde muy pequeña, y que amaba tanto y sinceramente... Y no había nadie que pudiera ayudarla ni le diera la más mínima esperanza de sobrevivir.
Los Seryogins trataron de mantener la presencia de ánimo durante tres e intentaron por todos los medios animar a la Princesa Elena, pero ella se hundió más y más en un estupor casi completo y, a veces, se sentó durante días en un estado indiferentemente congelado, casi no. reaccionando a los intentos de sus amigos de salvar su corazón y su mente de la depresión final. Solo hubo dos cosas que la trajeron brevemente de regreso al mundo real: si alguien comenzó a hablar sobre su hijo por nacer, o si surgieron nuevos detalles, incluso los más mínimos, sobre la supuesta muerte de su amado Nikolai. Ella quería desesperadamente saber (mientras aún estaba viva) lo que realmente sucedió y dónde estaba su esposo, o al menos dónde estaba enterrado (o abandonado) su cuerpo.
Desafortunadamente, casi no queda información sobre la vida de estas dos personas valientes y brillantes, Elena y Nikolai de Rohan-Hesse-Obolensky, pero incluso esas pocas líneas de las dos cartas restantes de Elena a su nuera, Alexandra , que de alguna manera sobrevivieron en los archivos familiares de Alexandra en Francia, muestran cuán profunda y tiernamente amaba la princesa a su esposo desaparecido. Solo han sobrevivido unas pocas hojas escritas a mano, algunas de las cuales, desafortunadamente, no se pueden distinguir en absoluto. Pero incluso lo logrado grita con profundo dolor una gran desgracia humana, que, sin haberla vivido, no es fácil de comprender e imposible de aceptar.
12 de abril de 1927 De una carta de la Princesa Elena a Alexandra (Alix) Obolenskaya:
"Hoy estoy muy cansado. Regresó de Sinyachikha completamente rota. Los vagones están llenos de gente, sería una pena incluso llevar ganado en ellos………………………….. Paramos en el bosque – olía tan delicioso a hongos y fresas allí… Es difícil de creer que estas personas desafortunadas fueron asesinadas allí! La pobre Ellochka (es decir, la Gran Duquesa Elizaveta Feodorovna, que era pariente de mi abuelo en la línea de Hesse) fue asesinada cerca, en esta terrible mina de Staroselim ... ¡qué horror! Mi alma no puede aceptar esto. ¿Recuerdas que dijimos: “Que se hunda la tierra”?... Gran Dios, ¿cómo puede ser que se hunda una tierra así?!...
¡Ay, Alix, mi querida Alix! ¿Cómo puedes acostumbrarte a tanto horror? ...................... ..................... Estoy tan cansada de rogar y humillándome... Todo será completamente inútil si la Cheka no acepta enviar una solicitud a Alapaevsk... Nunca sabré dónde buscarlo, y nunca sabré qué le hicieron. No pasa una hora sin que yo piense en un rostro tan familiar para mí... ¡Qué horror es imaginar que yace en algún pozo abandonado o en el fondo de una mina!... ¿Cómo puedes soportar esta pesadilla cotidiana, sabiendo que ya nunca lo veré?!.. Así como mi pobre Vasilek (el nombre que se le dio a mi padre al nacer) nunca lo veré... ¿Dónde está el límite de la crueldad? ¿Y por qué se llaman a sí mismos humanos?
DOI: 10.14529/mmph170306
ESTABILIZACIÓN DEL PÉNDULO INVERSO EN UN VEHÍCULO DE DOS RUEDAS
Y EN. Ryazhskikh1, M.E. Semenov2, A.G. Rukavitsyn3, O.I. Kanishchev4, A.A. Demchuk4, PA Meleshenko3
1 Estado de Vorónezh Universidad Tecnica, Vorónezh, Federación Rusa
2 Universidad Estatal de Arquitectura e Ingeniería Civil de Voronezh, Voronezh, Federación Rusa
3 Vorónezh Universidad Estatal, Vorónezh, Federación Rusa
4 Centro Educativo y Científico Militar Fuerza Aerea“Academia de la Fuerza Aérea que lleva el nombre del profesor N.E. Zhukovsky y Yu.A. Gagarin, Voronezh, Federación Rusa
Correo electrónico: [correo electrónico protegido]
Se considera un sistema mecánico, consistente en un carro de dos ruedas, en cuyo eje hay un péndulo inverso. La tarea es formar tal acción de control, formada de acuerdo con el principio de retroalimentación, que, por un lado, proporcionaría una ley de movimiento dada. medios mecanicos, y por otro lado, estabilizaría la posición inestable del péndulo.
Palabras clave: sistema mecánico; vehículo de dos ruedas; péndulo inverso; jugar; estabilización; control.
Introducción
La posibilidad de controlar sistemas técnicos inestables se ha considerado teóricamente durante mucho tiempo, pero la importancia práctica de dicho control se manifestó claramente solo en Últimamente. Resultó que los objetos de control inestables en manejo adecuado tienen una serie de cualidades "útiles". Ejemplos de tales objetos son astronave en la etapa de despegue, un reactor de fusión y muchos otros. Al mismo tiempo, si el sistema de control automático falla, un objeto inestable puede representar una amenaza significativa, un peligro tanto para los humanos como para ambiente. Un accidente en el Central nuclear de Chernóbil. A medida que los sistemas de control se vuelven más confiables, se está poniendo en práctica una gama cada vez más amplia de objetos técnicamente inestables en ausencia de control. uno de los mas ejemplos simples objetos inestables es el péndulo inverso clásico. Por un lado, el problema de su estabilización es relativamente simple y claro, por otro lado, se puede encontrar uso práctico al crear modelos de criaturas bípedas, así como dispositivos antropomórficos (robots, cibers, etc.) que se mueven sobre dos soportes. EN últimos años aparecieron trabajos dedicados a los problemas de estabilización de un péndulo inverso asociado con un vehículo de dos ruedas en movimiento. Estos estudios tienen aplicaciones potenciales en muchas áreas, como el transporte y la exploración, debido al diseño compacto, la facilidad de operación, la alta maniobrabilidad y el bajo consumo de combustible de dichos dispositivos. Sin embargo, el problema que se examina aún está lejos de una solución definitiva. Se sabe que muchas tradiciones dispositivos tecnicos tienen estados estables e inestables y modos de operación. Un ejemplo típico es el Segway, inventado por Dean Kamen, un scooter eléctrico autoequilibrado con dos ruedas ubicadas a ambos lados del conductor. Las dos ruedas del scooter están alineadas. El Segway se equilibra automáticamente cuando cambia la posición del cuerpo del conductor; para ello, se utiliza un sistema de estabilización de indicadores: las señales de los sensores giroscópicos y de inclinación líquida se alimentan a microprocesadores que generan señales eléctricas que actúan sobre los motores y controlan sus movimientos. Cada rueda del Segway es impulsada por su propio motor eléctrico, que reacciona a los cambios en el equilibrio del automóvil. Cuando el cuerpo del ciclista se inclina hacia adelante, el segway comienza a rodar hacia adelante, mientras que el ángulo de inclinación del cuerpo del ciclista aumenta, la velocidad del segway aumenta. Cuando el cuerpo está inclinado hacia atrás, auto-
kat reduce la velocidad, se detiene o rueda en reversa. El rodaje en el primer modelo se produce con la ayuda de un mando giratorio, en los nuevos modelos, girando la columna hacia la izquierda y hacia la derecha. Los problemas de control de sistemas mecánicos oscilatorios son de considerable interés teórico y gran importancia práctica.
Se sabe que durante el funcionamiento de los sistemas mecánicos debido al envejecimiento y desgaste de las piezas, inevitablemente surgen contragolpes y paradas, por lo tanto, para describir la dinámica de tales sistemas, es necesario tener en cuenta la influencia de los efectos de histéresis. Los modelos matemáticos de tales no linealidades, de acuerdo con los conceptos clásicos, se reducen a operadores, que se consideran como transformadores en los espacios de funciones correspondientes. La dinámica de tales convertidores se describe mediante las relaciones "entrada-estado" y "estado-salida".
Formulación del problema
En este artículo, consideramos un sistema mecánico que consiste en un carro de dos ruedas, en cuyo eje hay un péndulo inverso. La tarea es formar tal acción de control que, por un lado, proporcionaría una ley de movimiento dada de los medios mecánicos y, por otro lado, estabilizaría la posición inestable del péndulo. En este caso, se tienen en cuenta las propiedades de histéresis en el lazo de control del sistema en estudio. A continuación se muestra una representación gráfica de los elementos estudiados. sistema mecánico- dos ruedas vehículo con un péndulo inverso unido a él.
Arroz. 1. Los principales elementos estructurales del dispositivo mecánico considerado.
aquí / 1 / I feili / Fr I
" 1 " \ 1 \ 1 yo R J
¡Hora! / / / / /1 / / /
Arroz. 2. Ruedas izquierda y derecha del dispositivo mecánico con control de par
Parámetros y variables que describen el sistema en consideración: j - ángulo de rotación del vehículo; D es la distancia entre dos ruedas a lo largo del centro del eje; R es el radio de las ruedas; Jj - momento de inercia; Tw es la diferencia entre los pares de las ruedas izquierda y derecha; v-
velocidad longitudinal del vehículo; c - el ángulo de desviación del péndulo de la posición vertical; m es la masa del péndulo invertido; l es la distancia entre el centro de gravedad del cuerpo y
Eje de la rueda; Ti - la suma de los pares de las ruedas izquierda y derecha; x - movimiento del vehículo en la dirección de la velocidad longitudinal; M es la masa del chasis; M* - masa de ruedas; Y - solución de contragolpe.
Sistemas dinámicos
La dinámica del sistema se describe mediante las siguientes ecuaciones:
n = - + - Tn, W en á WR n
en = - - ml C0S en Tn,
donde T* = Tb - TJ; Tp \u003d Tb + Tch; Mx \u003d M + m + 2 (M * + ^ *); 1v \u003d t / 2 + 1C; 0. \u003d Mx1v-t2 / 2 co2 v;
<Р* = Рл С)Л = ^ С № = ^ О. (4)
El modelo que describe la dinámica de los cambios en los parámetros del sistema se puede representar como dos subsistemas independientes. El primer subsistema consta de una ecuación: el subsistema p,
determinación de los movimientos angulares del vehículo:
La ecuación (5) se puede reescribir como un sistema de dos ecuaciones:
donde e1 \u003d P-Py, e2 \u003d (P-(Ra.
El segundo subsistema, que describe los movimientos radiales del vehículo, así como las oscilaciones del péndulo instalado en él, consta de dos ecuaciones - (y, v) -subsistema:
U =-[ Jqml in2 sen in - m2l2 g sen in cos in] + Jq Tu W in S J WR u
en =- - ml C ° * en Tv W WR
El sistema (7) se representa convenientemente como un sistema de ecuaciones de primer orden:
¿4 = TG" [ Jqml(qd + e6)2 sin(e5 + qd) - m¿l2g sin(e5 + qd) cos(e5 + qd)] + TShT v- Xd,
¿6 =~^- ^^^ +c)
donde W0 = MxJq- П121 2cos2(qd + e5), e3 = X - Xd , ¿4 = v - vd , ¿5 =q-qd, ¿6 =q-qd
Considere el subsistema (6), que estará controlado por el principio de retroalimentación. Para hacer esto, introducimos una nueva variable y definimos la superficie de conmutación en el espacio de fase del sistema como ^ = 0.
5 = adentro! + с1е1, (9)
donde c es un parámetro positivo. Se sigue directamente de la definición:
■I \u003d e + c1 e1 -llorar + c1 e1. (10)
Para estabilizar el movimiento de rotación, definimos el momento de control de la siguiente manera:
T# P - ^ v1 - -MgP(51) - k2 (11)
donde, son parámetros especificados positivamente.
De igual forma, construiremos el control del segundo subsistema (8), el cual también controlaremos según el principio de retroalimentación. Para hacer esto, introducimos una nueva variable y definimos la superficie de conmutación en el espacio de fase del sistema como ■2 = 0.
■2 = vz + S2vz, (12)
donde c2 es un parámetro positivo, entonces
1 . 2 2 2
■2 \u003d e3 + c2 e3 \u003d (s + b6) ^5 + ve) - m 1 § ^5 + s1)C08 (e5 + ba)] +
7^T - + c2 mi
Para estabilizar el movimiento radial, definimos el momento de control:
tt "2/2 ^ k T \u003d - Km / (wi + eb) r ^ m (eb + wi) + n ^ + wi) +kA ^],(14)
donde k3, k4 son parámetros dados positivamente.
Para controlar simultáneamente ambos subsistemas del sistema, introducimos una acción de control adicional:
\u003d § Xapv - [va + c3 (v-vy) - k588n (^3) - kb 53], (15)
donde § es la aceleración de un libre
caídas; c3, k5, kb - parámetros positivos; 53 - superficie de conmutación, determinada por la relación:
53 = e6 + c3e5.
Formulemos los principales resultados del trabajo, que consisten en la posibilidad fundamental de estabilizar ambos subsistemas, bajo los supuestos realizados respecto a las acciones de control, en la vecindad de la posición de equilibrio cero.
Teorema 1. El sistema (6) con la acción de control (11) es absolutamente asintóticamente estable:
Nsh || e11|® 0,
Nsh || e2 ||® 0. t®¥u 2
Prueba: definimos la función de Lyapunov como
donde a = Dj 2 RJp.
Obviamente, la función V > 0, entonces
V = W1 Si = Si. (18)
Sustituyendo (14) en V, obtenemos
V = -(£ Sgn(S1) + k2(S1))S1. (19)
Es obvio que V1 Teorema 2. Considere el subsistema (8) con acción de control (14). Bajo los supuestos realizados, este sistema es absolutamente asintóticamente estable, es decir, bajo cualquier condición inicial, se cumplen las siguientes relaciones: límite ||e3 ||® 0, t®¥ (20) lím 11 e41|® o. Demostración: definimos la función de Lyapunov para el sistema (8) usando la relación donde b =Wo R!Je. Obviamente, la función V2 > 0, y V2 = M S2 = S2, ya que existen zonas muertas en relación con la acción de control. vamos a traer Breve descripción del transductor de histéresis utilizado en el futuro - contragolpe, según la interpretación del operador. Salida del convertidor: la reacción en las entradas monótonas se describe mediante la relación: x(t0) para aquellos t para los cuales x(t0) - h< u(t) < x(t0), x(t) = \u(t) при тех t, при которых u(t) >x(t0), (24) u(t) + h para aquellos t para los cuales u(t)< x(t0) - h, que se ilustra en la Fig. 3. Usando la identidad del semigrupo, la acción del operador se extiende a todas las entradas monótonas por partes: à x(t) = à [ à x(t1), h]x(t) (25) y con la ayuda de una construcción límite especial en todos los continuos. Dado que la salida de este operador no es diferenciable, a continuación se utiliza la aproximación de la holgura mediante el modelo Bowk-Ven. Este conocido modelo semifísico es ampliamente utilizado para la descripción fenomenológica de los efectos de histéresis. La popularidad del modelo Bowk-Vienna conocido por su capacidad para capturar analíticamente diversas formas ciclos de histéresis. La descripción formal del modelo se reduce al sistema. las siguientes ecuaciones: Fbw (x, ^ = ax() + (1 -a)Dkz(t), = D"1(AX -p\x \\z \n-1 z-yx | z |n). (26) Fbw(x,t) se trata como la salida del transductor de histéresis y x(t) como la entrada. Aquí n > 1, D > 0 k > 0 y 0<а< 1. Arroz. 3. Dinámica de las correspondencias de retroceso de entrada-salida Considere una generalización de los sistemas (6) y (8), en los que la acción de control se alimenta a la entrada del convertidor de histéresis, y la salida es la acción de control en el sistema: Fbw (x, t) = akx(t) + (1 - a)Dkz(t), z = D_1(Ax-b\x || z \n-1 z - gx | z\n). ¿4 = W-J mlQd + eb)2 sin(e5 + q) - m2l2g sin(e5 + ed) cos(e5 + 0d)] + ¿b = W -Fbw (x, t) = akx(t) + (1 - a)Dkz(t), ^ z = D_1(A x-b\x\\z\n-1 z-gx \ z\n). Como antes, en el sistema bajo consideración, el problema principal fue la estabilización, es decir, el comportamiento asintótico de sus variables de fase. A continuación se muestran gráficos para los mismos parámetros físicos del sistema con y sin contragolpe. Este sistema fue investigado por medio de experimentos numéricos. Este problema fue resuelto en el entorno de programación Wolfram Mathematica. Los valores de las constantes y las condiciones iniciales se dan a continuación: metro = 3; M=5; mw = 1; D=1,5; R = 0,25; l = 0,2; Jw = 1,5; Jc = 5; Jv = 1,5; j(0) = 0,x(0) = 0; Q(0) = 0,2; y(0) = [ j(0) x(0) Q(0)f = )