Абсолютні та відносні координати. Робоча площина. Другий семінар – допоміжні елементи Відносні декартові координати
Залежно від проставляння розмірів на кресленні деталі, а також виходячи із зручності програмування та можливостей верстата з ЧПУ, положення будь-якого елемента геометрії деталі можна задати в абсолютній або відносній системі координат.
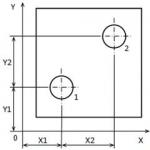
У абсолютної системи координатвідлік провадиться від початкової нульової точки. Задається функцією G 90 (absolute). Якщо розглядати абсолютну систему координат на прикладі обробки двох отворів 1 і 2 (рис. 3.22 а), то можна відзначити, що положення середини першого отвору (точка 1) визначатиметься розмірами X 1 і Y 1 від нуля
(від початку системи координат), і положення другого отвору (точка 2) також задаватиметься від нуля розмірами X 2 та Y 2.
 |
|
| а) | б) |
Мал. 3.22. Системи координат: а – абсолютні (absolute); б - відносні (incremental)
У відносної системи координатвідлік провадиться від останньої точки траєкторії переміщення. Задається функцією G 91 (incremental). Якщо аналізувати принцип завдання координат точок у відносній системі відліку (рис. 3.22, б), то можна відзначити, що положення першого отвору аналогічно попередньому визначатиметься розмірами X 1 і Y 1 від нуля (від початку системи координат), у той час як положення другого отвору задаватиметься від точки 1 розмірами X 2 та Y 2. Іншими словами, у відносній системі відліку координати наступної точки задаються у приростах від останньої заданої точки.
Запитання та завдання для самоконтролю
1. Що таке кадр керуючої програми?
2. З чого складається кадр програми, що управляє?
3. Дайте визначення системи координат.
4. Що таке декартова система координат?
5. Дайте визначення полярної системи координат.
6. Що називають сферичною системою координат?
7. У чому різниця між абсолютною та відносною системами відліку?
8. Дайте визначення лінійної, кругової та гвинтової інтерполяцій.
9. Назвіть види та призначення інформації, що міститься в програмі керування.
10. Опишіть склад кадру керуючої програми N 001 G 01 X-004000 T 02 L 02 F6 25 S 24 M 03 М 08 LF.
Тести до розділу
1. Частина керуючої програми, що складається з інформації для виконання одного переходу при обробці деталі або для переміщення супорта з однієї точки в іншу при позиціонуванні (відведення, підведення), а також для виконання технологічних команд, називається:
а) кадром;
б) словом;
в) адресою;
г) системою координат;
буд) вмістом адреси.
2. Частина кадру, що містить інформацію про одну з програмованих функцій (команд), називається:
а) словом;
б) адресою;
в) системою координат;
г) вміст адреси.
3. Умовне найменування мови програмування пристроїв з числовим програмним управлінням – це:
а) G-код;
б) М-код;
в) S-код;
г) F-код;
д) З або З +.
4. Сукупність чисел, що визначають положення будь-якої точки, називається:
а) координатами точки;
б) системою координат;
в) радіальною координатою;
г) полярною віссю.
5. Комплекс визначень, що реалізує метод координат, тобто спосіб визначати положення точки чи тіла за допомогою чисел чи інших символів називається:
а) системою координат;
б) координатами точки;
в) радіальною координатою;
г) полярною віссю.
Завдання (вправи, ситуаційні завдання тощо)
із зразками виконання, рішення
Програмування в абсолютних координатах G90. Програмування у відносних координатах – G91.Інструкція G90 інтерпретуватиме переміщення як абсолютні значення по відношенню до активної нульової точки. Інструкція G91 інтерпретуватиме переміщення як збільшення щодо раніше досягнутих положень. Ці інструкції модальні.
Встановлення значень координат G92.Інструкцію G92 можна використовувати у кадрі без осьової (координатної) інформації або з осьовою координатною інформацією. За відсутності осьової інформації всі значення координат перетворюються на систему координат верстата; при цьому знімаються всі компенсації (корекції) та усунення нуля. За наявності осьової інформації вказані значення координат стають поточними. Ця інструкція не ініціює будь-яких переміщень, діє у межах одного кадру.
N…G92 X0 Y0 /Поточні значення координат X та Y встановлюються в нуль. Поточне значення координати Z залишається постійним.
N…G92 / Знімаються корекції та усунення нуля.
Вибір площини – G17 (площина XY), G18 (площина XZ), G19 (площина YZ).Інструкції визначають вибір робочої площини у системі координат деталі чи програми. Робота інструкцій G02, G03, G05, програмування в полярних координатах, еквідистантна корекція безпосередньо з цим вибором.
Траєкторії руху (типи інтерполяції)
Лінійна інтерполяція передбачає рух прямої лінії в трехкоординатном просторі. Перед початком інтерполяційних розрахунків система ЧПУ визначає довжину колії, виходячи із запрограмованих координат. У процесі руху здійснюється контроль контурної подачі те щоб її величина вбирається у допустимих значень. Рух по всіх координатах має завершитись одночасно.
При круговій інтерполяції рух здійснюється по колу заданої робочої площині. Параметри кола (наприклад, координати кінцевої точки та її центру) визначаються на початок руху, виходячи із запрограмованих координат. У процесі руху здійснюється контроль контурної подачі те щоб її величина вбирається у допустимих значень. Рух по всіх координатах має завершитись одночасно.
Гвинтова інтерполяція є комбінацією кругової і лінійної.
Лінійна інтерполяція при прискореному переміщенні – G00, G200.У процесі прискореного переміщення запрограмоване переміщення інтерполується, а рух кінцевої точки здійснюється по прямій лінії з максимальною швидкістю подачі. Швидкість і прискорення подачі, принаймні однієї осі, - максимальні. Швидкість подачі інших осей контролюється таким чином, щоб рух всіх осей завершився в кінцевій точці одночасно. Поки інструкція G00 активна, рух уповільнюється до нуля у кожному кадрі. Якщо ж уповільнення швидкості подачі до нуля в кожному кадрі потреби немає, то замість G00 використовують G200. Значення максимальної швидкості подачі не програмують, але задають так званими машинними параметрами в пам'яті системи ЧПУ. Інструкції G00, G200 є модальними.
Лінійна інтерполяція із запрограмованою швидкістю подачі – G01.Переміщення із заданою швидкістю подачі (F слові) у напрямку до кінцевої точки кадру здійснюється по прямій лінії. Усі координатні осі завершують рух одночасно. Швидкість подачі кінці кадру знижується до нуля. Запрограмована швидкість подачі контурної, тобто. значення подачі для кожної окремої координатної осі будуть меншими. Значення швидкості подачі зазвичай обмежують налаштуванням «машинних параметрів». Варіант комбінації слів із інструкцією G01 у кадрі: G01_X_Y_Z_F_.
Кругова інтерполяція – G02, G03.Переміщення в кадрі здійснюється по колу з контурною швидкістю, заданою активним F-слові. Рух по всіх координатних осях завершується у кадрі одночасно. Ці інструкції модальні. Приводи подачі задають переміщення по колу із запрограмованою подачею у вибраній площині інтерполяції; при цьому інструкція G02 визначає рух за годинниковою стрілкою, а інструкція G03 проти годинникової стрілки. При програмуванні коло задають за допомогою її радіусу або координат центру. Додаткова опція програмування кола визначається інструкцією G05: кругова інтерполяція з виходом на траєкторію щодо дотичної.
Програмування кола за допомогою радіусу.Радіус завжди задають у відносних координатах; на відміну кінцевої точки дуги, яка може бути задана як і відносних, і у абсолютних координатах. Використовуючи положення початкової та кінцевої точок, а також і значення радіусу, система ЧПУ насамперед визначає координати кола. Результатом розрахунку можуть стати координати двох точок ML, MR, розташованих відповідно зліва і праворуч від прямої, що з'єднує початкову та кінцеву точки.
Розташування центру кола залежить від знака радіусу; при позитивному радіусі центр перебуватиме ліворуч, а за негативного радіусу – справа. Розташування центру визначається також інструкціями G02 та G03.
Варіант поєднання слів з інструкцією G03 в кадрі: N_G17_G03_X_Y_R±_F_S_M. Тут: інструкція G17 означає вибір кругової інтерполяції у площині X/Y; інструкція G03 визначає кругову інтерполяцію у напрямку проти годинникової стрілки; X_Y_ являють собою координати кінцевої точки дуги кола; R – радіус кола.
Програмування кола за допомогою координат центру.Координатні осі, щодо яких визначається положення центру, паралельні осям X, Y і Z відповідно, а відповідні координати центру мають найменування I, J і K. Координати встановлюють відстані між початковою точкою дуги кола та її центром М у напрямках, паралельних осям. Знак визначається напрямом вектора А до М.
N… G90 G17 G02 X350 Y250 I200 J-50 F… S… M…
Приклад програмування повного кола: N… G17 G02 I… F… S… M…
Кругова інтерполяція з виходом на кругову траєкторію щодо дотичної – G05.Система ЧПУ використовує інструкцію G05 для розрахунку такої кругової ділянки, вихід на яку з попереднього кадру (з лінійною або круговою інтерполяцією) здійснюється за дотичною. Параметри дуги, що формується, визначаються автоматично; тобто. програмується лише її кінцева точка, а радіус не задається.
Гвинтова інтерполяція - G202, G203.Гвинтова інтерполяція складається з кругової інтерполяції у вибраній площині та лінійної інтерполяції для інших координатних осей, загальним числом до шести кругових осей. Площина кругової інтерполяції визначається інструкціями G17, G18, G19. Рух по колу за годинниковою стрілкою здійснюється відповідно до інструкції G202; рух по колу проти годинникової стрілки – G203. Програмування кола можливе як із використанням радіусу, так і з використанням координат центру кола.
N… G17 G203 X… Y… Z… I… J… F… S… M…
Для вирішення більшості завдань у прикладних науках необхідно знати розташування об'єкта або точки, яке визначається за допомогою застосування однієї з прийнятих систем координат. Крім того, є системи висот, які також визначають висотне місцезнаходження точки на
Що таке координати
Координати - числові чи буквені значення, з допомогою яких можна визначити місце, де розташована точка біля. Як наслідок, система координат – це сукупність однотипних значень, що мають однаковий принцип знаходження точки чи об'єкта.
Знаходження розташування точки потрібно для вирішення багатьох практичних завдань. У такій науці, як геодезія, визначення місцезнаходження точки у заданому просторі – головна мета, на досягненні якої будується вся подальша робота.
Більшість систем координат, як правило, визначають розташування точки на площині, обмеженою лише двома осями. Щоб визначити позицію точки в тривимірному просторі, застосовується також система висот. З її допомогою можна дізнатися точне місцезнаходження об'єкта, що шукається.
Коротко про системи координат, що застосовуються у геодезії
Системи координат визначають місце розташування точки на території, задаючи їй три значення. Принципи їх розрахунку різні кожної координатної системи.

Основні просторові системи координат, що застосовуються у геодезії:
- Геодезичні.
- Географічні.
- Полярні.
- Прямокутні.
- Зональні координати Гауса-Крюгера.
Усі системи мають свою початкову точку відліку, величини для місцезнаходження об'єкта та області застосування.
Геодезичні координати
Основною фігурою, яка застосовується для відліку геодезичних координат, є земний еліпсоїд.
Еліпсоїд - тривимірна стисла фігура, яка найкраще є фігурою земної кулі. Зважаючи на те, що земна куля - математично неправильна фігура, замість неї для визначення геодезичних координат використовують саме еліпсоїд. Це полегшує здійснення багатьох розрахунків визначення положення тіла лежить на поверхні.

Геодезичні координати визначаються трьома значеннями: геодезичною широтою, довготою та висотою.
- Геодезична широта - це кут, початок якого лежить на площині екватора, а кінець - у перпендикуляра, проведеного до точки, що шукається.
- Геодезична довгота - це кут, який відраховують від нульового меридіана до меридіана, на якому знаходиться точка, що шукається.
- Геодезична висота – величина нормалі, проведеної до поверхні еліпсоїда обертання Землі від цієї точки.
Географічні координати
Для вирішення високоточних завдань вищої геодезії необхідно розрізняти геодезичні та географічні координати. У системі, що застосовується в інженерній геодезії, таких відмінностей, зважаючи на невеликий простір, що охоплюється роботами, як правило, не роблять.
Для визначення геодезичних координат як площину відліку використовують еліпсоїд, а для визначення географічних - геоїд. Геоїд є математично неправильною фігурою, більш наближеною до фактичної фігури Землі. За його рівню поверхню приймають ту, що продовжена під рівнем моря в його спокійному стані.

Географічна система координат, що застосовується в геодезії, описує позицію точки у просторі із зазначенням трьох значень. Довгота збігається з геодезичною, оскільки точкою відліку також буде званий Грінвічським. Він проходить через однойменну обсерваторію у місті Лондоні. визначається від екватора, проведеного на поверхні геоіду.
Висота в системі місцевих координат, що застосовується в геодезії, відраховується від рівня моря у його спокійному стані. На території Росії та країн колишнього Союзу відміткою, від якої виробляють визначення висот, є Кронштадтський футшток. Він розташований на рівні Балтійського моря.
Полярні координати
Полярна система координат, що застосовується у геодезії, має інші нюанси твору вимірів. Вона застосовується на невеликих ділянках місцевості для визначення відносного розташування точки. Початком відліку може бути будь-який об'єкт, позначений як вихідний. Таким чином, за допомогою полярних координат не можна визначити однозначне місцезнаходження точки на території земної кулі.

Полярні координати визначаються двома величинами: кутом та відстанню. Кут відраховується від північного напрямку меридіана до заданої точки, визначаючи її положення у просторі. Але одного кута буде недостатньо, тому вводиться радіус-вектор - відстань від точки стояння до об'єкта, що шукається. За допомогою цих двох параметрів можна визначити місце розташування точки в місцевій системі.
Як правило, ця система координат використовується для виконання інженерних робіт, які проводяться на невеликій ділянці місцевості.
Прямокутні координати
Прямокутна система координат, що застосовується у геодезії, також використовується на невеликих ділянках місцевості. Головним елементом системи є координатна вісь, від якої походить відлік. Координати точки знаходяться як довжина перпендикулярів, проведених від осей абсцис і ординат до точки, що шукається.

Північний напрямок осі Х і східний осі У вважаються позитивними, а південний і західний - негативними. Залежно від знаків та чвертей визначають знаходження точки у просторі.
Координати Гауса-Крюгера
Координатна зональна система Гаусса-Крюгера схожа на прямокутну. Різниця в тому, що вона може застосовуватися на всій території земної кулі, а не тільки для невеликих ділянок.
Прямокутні координати зон Гаусса-Крюгера є проекцією земної кулі на площину. Вона виникла у практичних цілях для зображення великих ділянок Землі на папері. Спотворення, що виникають при перенесенні, вважаються незначними.
Згідно з цією системою, земна куля ділиться по довготі на шестиградусні зони з осьовим меридіаном посередині. Екватор знаходиться в центрі горизонтальної лінії. У результаті налічується 60 таких зон.

Кожна із шістдесяти зон має власну систему прямокутних координат, що відраховується по осі ординат від Х, а по осі абсцис - від ділянки земного екватора У. Для однозначного визначення місцезнаходження на території всієї земної кулі перед значеннями Х і У ставлять номер зони.
Значення осі Х біля Росії, зазвичай, є позитивними, тоді як значення У можуть і негативними. Щоб уникнути знака мінус у величинах осі абсцис, осьовий меридіан кожної зони умовно переносять на 500 метрів на захід. Тоді всі координати стають позитивними.
Система координат була запропонована Гауссом як можлива і розрахована математично Крюгером в середині двадцятого століття. З того часу вона використовується в геодезії як одна з основних.
Система висот
Системи координат і висот, що застосовуються в геодезії, використовуються для точного визначення положення точки на Землі. Абсолютні висоти відраховуються від рівня моря або іншої поверхні, що прийнята за вихідну. Крім того, є відносні висоти. Останні відраховуються як перевищення від точки до будь-якої іншої. Їх зручно застосовувати для роботи у місцевій системі координат з метою спрощення подальшої обробки результатів.
Застосування систем координат у геодезії
Крім перерахованих вище, є й інші системи координат, що застосовуються в геодезії. Кожна з них має свої переваги та недоліки. Є також свої сфери роботи, для яких актуальним є той чи інший спосіб визначення місцезнаходження.
Саме ціль роботи визначає, які системи координат, які застосовуються в геодезії, краще використовувати. Для роботи на невеликих територіях зручно використовувати прямокутну та полярну системи координат, а для вирішення масштабних завдань необхідні системи, що дозволяють охопити всю територію земної поверхні.
Комп'ютерна графіка
Навчальний посібник
Санкт-Петербург
1.1. Основи роботи в середовищі AutoCAD.
1.2. Побудова креслення за 3D-технологією. 10
1.3. Лабораторна робота №1. 15
1.4. Типові з'єднання деталей. 19
1.5. Види виробів та конструкторських документів. 27
1.6. Лабораторна робота №2. 32
2.1. Об'єкти в 3ds Max. 39
2.2. Методи перетворення геометричних об'єктів. 45
2.3. Лабораторна робота №3. 48
2.4. Лофтінгове моделювання. 50
2.5. Деформація моделей, побудованих методом лофтінгу. 53
2.6. Лабораторна робота №4. 56
2.7. Сітчасті оболонки. 58
2.8. Редагування сітчастих оболонок. 61
2.9. Лабораторна робота №5. 66
2.10. Джерела світла. 67
2.11. Знімальні камери.. 70
2.12. Матеріали.. 75
2.13. Лабораторна робота №6. 80
2.14. Анімація, розваги. 82
2.15. Рух об'єктів заданим шляхом. 86
2.16. Лабораторна робота №7. 88
3. Графічне програмування. 90
3.1. Опис набору драйверів DirectX.. 90
3.2. Опис графічної системи OpenGL. 93
3.3. Основи OpenGL. 96
3.4. Малювання геометричних об'єктів. 102
3.5. Лабораторна робота №8. 107
Список литературы.. 110
AutoCAD - найбільш поширена у світі система автоматизованого проектування та випуску робочої конструкторської та проектної документації. З його допомогою створюються двовимірні та тривимірні проекти різного ступеня складності у галузі архітектури та будівництва, машинобудування, геодезії тощо. Формат зберігання даних AutoCAD де-факто визнано міжнародним стандартом зберігання та передачі проектної документації.
Основною перевагою AutoCAD є доступність для створення на його базі потужних спеціалізованих розрахунково-графічних пакетів. Autodesk випускає дві основні лінійки продуктів, призначених для архітекторів (Autodesk Architectural Desktop) та машинобудівників (Autodesk Mechanical Desktop). Всі ці продукти використовують AutoCAD як основу.
Першу версію MicroCAD (прототипу AutoCAD) було випущено 25 серпня 1982 року. Цей день вважається датою виходу першого продукту Autodesk.
Основи роботи у середовищі AutoCAD
Рядок стану
Рядок стану (рис. 1.1) відображає поточні координати курсору та містить кнопки увімкнення/вимкнення режимів креслення:
· SNAP - Snap Mode (Крокова прив'язка) - включення та вимкнення крокової прив'язки курсора;
· GRID - Grid Display (Відображення сітки) - включення та вимикання сітки;
· ORTHO – Ortho Mode (Режим «Орто») – включення та вимикання ортогонального режиму;
· POLAR - Polar Tracking (Полярне відстеження) - включення та вимкнення режиму полярного відстеження;
· OSNAP – Object Snap (Об'єктна прив'язка) – включення та вимикання режимів об'єктної прив'язки;
· OTRACK - Object Snap Tracking (Відстеження при об'єктній прив'язці) - увімкнення та вимкнення режиму відстеження при об'єктній прив'язці;
· MODEL/PAPER - Model or Paper space (Простір моделі чи аркуша) – перемикання з простору моделі в простір аркуша;
· LWT - Show/Hide Lineweight (Відображення ліній відповідно до ваги) - увімкнення та вимкнення режиму відображення ліній відповідно до ваг (товщин).
Мал. 1.1. Рядок стану
Використання об'єктної прив'язки дозволяє скоротити час роботи над кресленням, оскільки у ряді випадків відпадає необхідності ручного введення координат, необхідно лише вказати курсором на існуючу точку, що належить якомусь об'єкту.
Вікно командних рядків
Вікно Command Line (Командний рядок, рис. 1.2) зазвичай розташоване над рядком стану і служить для введення команд і виведення підказок та повідомлень AutoCAD. На рис. 1.2 наведено приклад створення клина (інструмент Wedge панелі інструментів Solids) за допомогою командного рядка. Його можна задати шляхом вказівки двох протилежних вершин основи та висоти, або однієї вершини, довжини, висоти та ширини (для клина, вписаного в куб, – вершини та значення сторони). При перерахуванні параметри задаються через кому. Розділювач цілої та дробової частини – точка.

Мал. 1.2. Вікно командних рядків
Системи координат
У AutoCAD існують дві системи координат: світова система координат World Coordinate System (WCS) та система координат User Coordinate System (UCS). Активна лише одна система координат, яку прийнято називати поточною. У ній координати визначаються будь-яким доступним способом.
Основна відмінність світової системи координат від користувача полягає в тому, що світова система координат може бути тільки одна (для кожного простору моделі та аркуша), і вона нерухома. Застосування системи координат не має практично жодних обмежень. Вона може бути розташована у будь-якій точці простору під будь-яким кутом до світової системи координат. Це пов'язано з тим, що простіше вирівняти систему координат з існуючим геометричним об'єктом, ніж визначати точне розміщення точки в тривимірному просторі.
Для роботи із системами координат служить панель «UCS» (рис. 1.3). З її допомогою можна, наприклад, перейти від системи координат до світової (кнопка «World UCS») або вирівняти систему координат по довільному об'єкту (кнопка «Object UCS»).
Мал. 1.3. Панель інструментів «UCS»
Абсолютні та відносні координати
У тривимірному і двовимірному просторі широко використовуються як абсолютні координати (що відраховуються від початку координат), так і відносні (що відраховуються від останньої зазначеної точки). Ознакою відносних координат є символ @ перед координатами точки, що задається: «@<число 1>,<число 2>,<число 3>».
Типові види на об'єкти
Для представлення моделі різних видів служить панель інструментів «View» (Вид, рис. 1.4). Вона дозволяє уявити модель як у шести стандартних видах, так і у чотирьох ізометричних.

Мал. 1.4. Панель інструментів "View"
Координати, які вказують розташування точки, враховуючи систему координат екрана, називаються абсолютними координатами. Наприклад, PSET(100,120) - означає, що у екрані з'явиться точка на 100 пікселів правіше і 120 пікселів нижче лівого верхнього кута, тобто. початку координат екрану
Координати точки, яка була намальована останньою, зберігаються у пам'яті комп'ютера. Ця точка називається точкою останнього посилання (ТПС). Наприклад, якщо при малюванні лінії вказати лише координати однієї точки, то на екрані буде проведено відрізок від ТПС до зазначеної точки, яка після цього сама стане ТПС. Відразу після увімкнення графічного режиму точкою останнього посилання є точка в центрі екрана.
Окрім абсолютних у QBASIC'і використовуються ще й відносні координати. Ці координати свідчать про величину переміщення ТПС. Щоб намалювати нову точку, використовуючи відносні координати, необхідно використовувати ключове слово STEP(X,Y), де Х і У - зміщення координат щодо ТПС.
Наприклад, PSET STEP(-5,10) - при цьому з'явиться точка, положення якої буде ліворуч на 5 і нижче на 10 точок щодо точки останнього посилання. Тобто, якщо точка останнього посилання мала координати, наприклад (100,100), то вийде точка з координатами (95,110).
Малювання ліній та прямокутників.
LINE(X1,Y1)-(X2,Y2),C- Малює відрізок, що з'єднує точки (Х1, У1) і (Х2, У2), кольором С.
Наприклад, LINE(5,5)-(10,20),4
Результат: 5 10
Якщо не вказувати першу координату, буде проведено відрізок з ТПС в точку з координатами (Х2, У2).
LINE(X1,Y1)-(X2,Y2), C, В- Малює контур прямокутника з кінцями діагоналі в точках (Х1,У1) і (Х2,У2), С - колір, В - маркер прямокутника.
Наприклад, LINE(5,5)-(20,20), 5, В
Результат: 5 20

Якщо замість маркера В вказати ВF, то буде намальовано зафарбований прямокутник (блок):
LINE(X1,Y1)-(X2,Y2),C, BF
Наприклад, LINE(5,5)-(20,20),5, BF
 Результат: 5 20
Результат: 5 20
Малювання кіл, еліпсів і дуг.
CIRCLE(X,Y), R, C- Малює коло з центром в точці (Х, У), радіусом R, кольором С.
Наприклад, CIRCLE(50,50), 10, 7
Результат:
 50
50
CIRCLE(X,Y), R, C, f1, f2- дуга кола, f1 та f2значення кутів дуги в радіанах від 0 до 6.2831, що визначають початок та кінець дуги.
CIRCLE(X,Y), R, C, е- еліпс, з центром у точці (Х, У), радіусом R, е - відношення вертикальної осі до горизонтальної.
Наприклад, CIRCLE(50,50), 20, 15, 7, 1/2
Результат: 30 50 70

У разі необхідності після параметра С можна вказати значення кутів дуги еліпс f1 і f2.
PAINT(X,Y), C, K- зафарбувати кольором З фігуру, намальовану кольором К (Х, У) - точка, що лежить усередині фігури. Якщо колір контуру збігається з кольором забарвлення, то вказують лише один колір: PAINT(X,Y), C
Наприклад, треба зафарбувати коло CIRCLE(150,50), 40, 5 кольором 4. Для цього треба виконати оператор PAINT(150,50), 4, 5, т.к. центр кола точно лежить всередині фігури, що зафарбовується, ми використовували його як внутрішню точку.
Вирішення задач.
Завдання 1.
Намалювати чотири точки, які лежать на одній горизонтальній прямій на відстані 20 пікселів одна від одної. Крапка останнього посилання має координату (15, 20).
Рішення: ПРИМІТКИ.
SCREEN 9: COLOR 5,15: REM графич. режим, фон 5, колір 15
CLS:REM очищення екрану
PSET(15,20) :REM малює точку з координатами (15,20)
PSET STEP(20,0) :REM малює точку зі зміщенням
PSET STEP(20,0) :REM щодо останньої на 20
PSET STEP(20,0): REM пікселів по осі ОХ.
Результат: 15 35 55 75

20. . . .
Завдання 2.
Намалювати три кола, центри яких лежать на одній горизонтальній прямій на відстані 30 пікселів один від одного. Радіуси кіл дорівнює 20, центр першого кола збігається з центром екрана.
Рішення.
 SCREEN 9 120 150 180
SCREEN 9 120 150 180
CIRCLE STEP(0, 0), 20, 15 100
CIRCLE STEP(30, 0), 20, 15
CIRCLE STEP(30, 0), 20, 15
Завдання 2.
Побудувати чотирикутник з вершинами (10,15), (30,25), (30,5) та (20,0).
LINE (10,15)-(30,25), 5
LINE - (30, 5),5
LINE - (25,0), 5
LINE - (10,15), 5
РЕЗУЛЬТАТ: 5 10 20 25 30
 15
15
Напишіть програму малювання довільної картинки.
Корисна порада: Перш ніж почати писати програму, намалюйте картинку на листку в клітинку і розставте потрібні координати. Ви відразу побачите, які числа будуть як операнди у Вашій програмі.